 亿控智能装备
亿控智能装备无框力矩电机:驱动未来的核心动力——技术解密与人形机器人革命中的关键角色
一、原理:颠覆传统结构的电磁动力之源
无框力矩电机(Frameless Torque Motor)是一种革命性的电机设计,其最大特点是完全摒弃传统电机的外壳、轴承、转轴等机械结构,仅保留最核心的电磁驱动单元——定子与转子。

1. 核心组件解析
- 定子:由高精度硅钢片层叠成环形铁芯,内部嵌入精密绕制的铜线圈。当三相电流输入时,线圈产生旋转磁场,磁场强度与电流频率、绕组拓扑结构直接相关
- 转子:采用高性能稀土永磁体(如钕铁硼)构成环形磁极阵列,通过过盈配合直接安装在设备主轴上。转子与定子间的气隙通常控制在0.3-0.8mm,以最大化磁能利用率。
2. 工作原理
当定子绕组通电后,产生的旋转磁场与转子永磁体的静态磁场相互作用,遵循麦克斯韦应力张量原理,在切向产生连续扭矩。由于省去了机械传动环节,能量转换效率可达95%以上,且实现“零背隙”精准控制。
二、特点:重新定义驱动系统的性能边界
1. 极致紧凑与轻量化
无框设计使电机体积减少40%-60%,例如步科股份的KBM-40系列外径仅40mm,重量不足300g,却能输出15Nm峰值扭矩,特别适合人形机器人手指关节等空间受限场景。
2. 动态性能飞跃
- 毫秒级响应:转子惯量低至传统电机的1/5,指令响应时间<3ms(数据来源:Allied Motion测试报告),满足仿生关节每秒10次以上的动作频率需求。
- 扭矩密度倍增:采用Halbach永磁阵列优化磁场分布,新一代产品如科尔摩根TBM系列扭矩密度突破40Nm/kg,较传统伺服电机提升3倍。
3. 系统集成革命
可直接嵌入机械臂关节、医疗CT机旋转架等宿主结构,通过环氧树脂灌封实现IP67防护等级,省去联轴器、减速器等中间件,降低系统复杂度与故障率。
三、应用:从精密制造到人形机器人的全面渗透
1. 人形机器人关节驱动
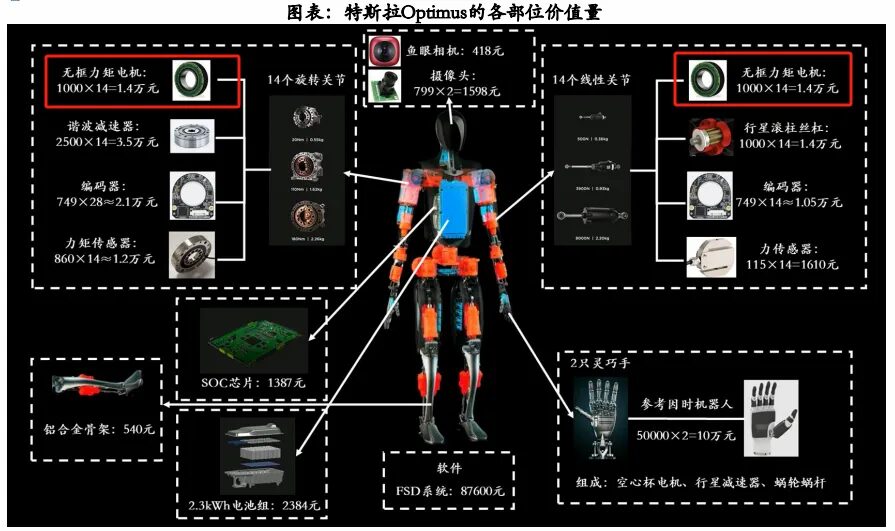
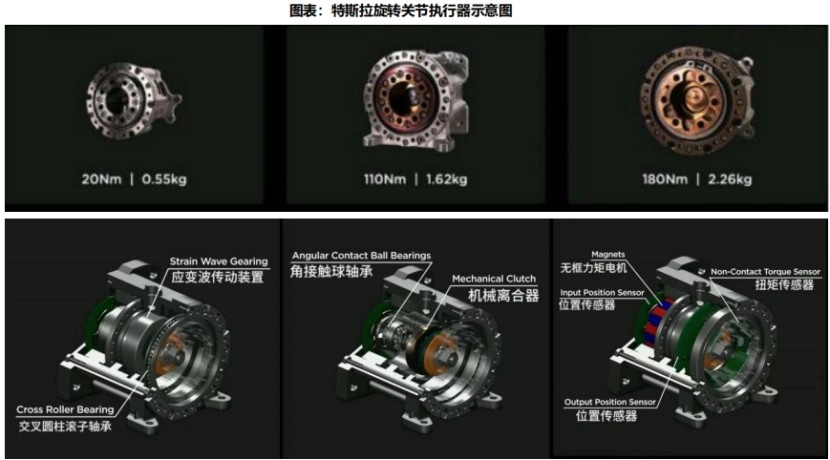
- 特斯拉Optimus:28个关节中14个采用无框力矩电机,实现11自由度手部抓握(单手指关节电机直径≤25mm)。
- 国产突破:禾川科技与优必选合作开发的Walker X机器人,膝关节电机持续扭矩达180Nm,自重仅1.2kg,支持70kg负载动态行走。
2. 高端装备领域
- 半导体光刻机:用于晶圆台纳米级定位,重复定位精度±0.1μm(如ASML设备配置方案)。
- 卫星指向机构:适应太空极端温差(-150℃~+120℃),磁钢采用钐钴材料防退磁。
3. 新兴市场爆发
2023年人形机器人行业对无框力矩电机的需求激增,单台用量可达28-40个,预计2025年全球市场规模将突破80亿元(数据来源:《人形机器人行业报告》)。

四、竞争格局:国产替代的突围之路
1. 外资品牌主导高端市场
- 科尔摩根(Kollmorgen):占据全球60%以上高端份额,TBM系列支持定制化磁场设计,适配2000Nm超大力矩场景。
- 派克汉尼汾(Parker):Aries系列集成智能传感器,可实时监测温度、振动状态,预防意外停机。
2. 国内厂商快速崛起
- 步科股份:第三代无框电机采用“分段式斜极”技术,将转矩波动抑制在0.5%以内,打破外资在协作机器人领域的垄断。
- 禾川科技:联合高校研发的“磁-热-力耦合仿真平台”,使电机设计周期缩短50%,产品线覆盖Φ15-Φ250全尺寸需求。
五、未来趋势:材料与智能化的双重进化
绿色制造:采用水溶性绝缘漆与可回收磁钢,碳排放较传统电机降低35%。
超导材料应用:低温超导绕组可提升扭矩密度至60Nm/kg,实验室阶段已实现突破。
自感知电机:内嵌MEMS传感器,实时反馈负载变化,使波士顿动力Atlas机器人完成高难度后空翻成为可能。
上一篇: AGV制动距离的计算与评估下一篇: 快速搞清楚电机种类和应用场景!
您好!请登录