 亿控智能装备
亿控智能装备二维码导航AGV系统:技术原理和应用发展解析!
一.技术起源与结合
AGV技术的进化史是一部工业自动化发展的缩影。1913年福特汽车引入的轨道导引车,如同地面上的机械铁轨,以0.3m/s的缓慢速度在固定路线上运送零部件,这种刚性运输方式持续了近半个世纪。直到1953年电磁导引技术的出现,通过在车间地面下埋设通有10kHz频率的电缆形成电磁场,使AGV具备了±15mm的定位能力,但路径变更仍需重新布线,改造成本高昂。
真正的变革发生在21世纪初。随着日本Denso公司开发的QR码在2004年成为国际标准,二维码的存储容量突破7KB,单码可容纳车间坐标、设备参数等完整物流信息。2012年德国库卡公司率先将工业级二维码识别器与AGV结合,在宝马莱比锡工厂的试点中,仅用2小时就完成了传统磁导系统需要3天的路径调整工作。这项技术突破直接推动了AGV从”固定轨道列车”向”智能运输机器人”的转变。
2010 年代起,二维码识别技术成熟,AGV 导航需求升级,二维码导航逐渐替代传统电磁 / 磁带导引技术。国内 AGV 二维码导航技术在 2010 年后快速发展,在汽车制造、仓储物流领域广泛应用,提升了 AGV 的定位精度和灵活性,拓展了应用范围。
二.应用原理
导航与定位机制
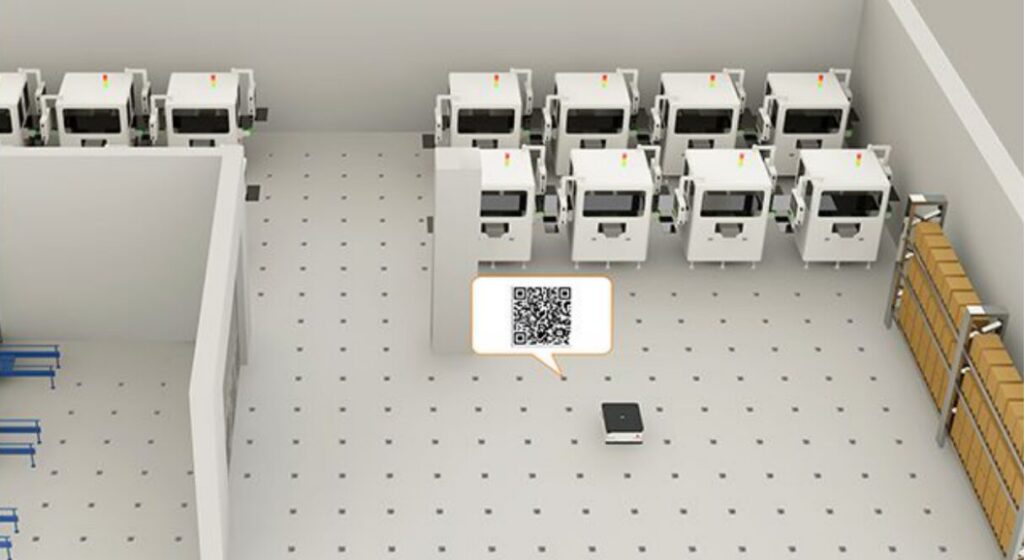
AGV 搭载的读码器扫描地面二维码获取位置编码、坐标偏移及航向角数据;调度系统根据二维码坐标信息生成导航指令序列,AGV 执行 “站点 – 站点” 移动,并通过 IMU 传感器校正航向;结合二维码定位、IMU 和编码器数据,实现高精度定位。
闭环控制系统
AGV 控制器根据二维码反馈的偏移量实时调整轮速,确保沿预设路径行驶;结合编码器里程数据、IMU 航向角及二维码定位信息,形成高精度闭环控制,定位精度可达 ±1mm ;通过闭环控制,AGV 在动态环境中稳定行驶,适应复杂路况和任务需求。
系统架构与功能模块
感知层由读码器、激光雷达、避障传感器协同工作,实现环境感知与安全防护。决策层通过上位控制系统与 AGV 单机控制模块通信,完成任务分配、路径优化及异常处理。执行层则依靠驱动电机、移载机构(如推挽式 / 辊道式)执行搬运动作,并通过交互接口与仓库管理系统(WMS)联动 。
三.技术优势与典型场景
技术优势
二维码导航路径灵活可调,可根据生产需求快速调整;相比传统导引方式,定位精度更高,可达 ±1mm,满足精密生产需求;二维码标签易于维护,减少导轨磨损和维护成本。
典型场景
在汽车制造领域,一汽大众佛山工厂的焊装车间铺设了3200个抗压强度达5吨/㎡的陶瓷二维码标签。AGV组成的柔性输送系统实现了车身总成±0.2mm的定位精度,使多车型混线生产的切换时间从4小时压缩至18分钟。每个关键工位设置的双重校验二维码配合视觉引导,将装配失误率降至百万分之一。

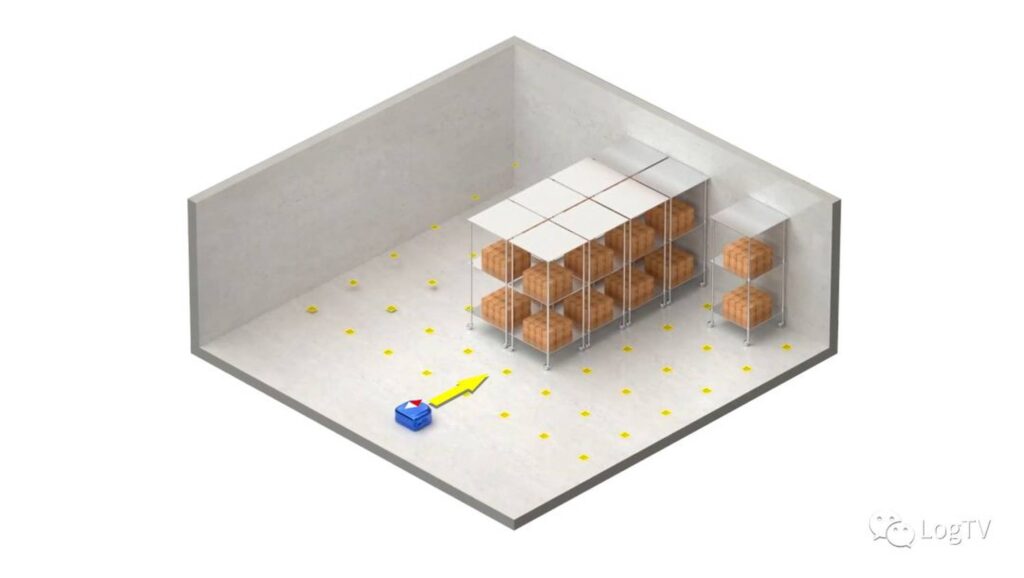
智能仓储场景更凸显二维码导航的灵活性。京东上海亚洲一号仓库采用九宫格阵列式二维码布局,每个货架底部嵌入3个校验码,配合RFID双频识别技术,使仓储密度提升40%,拣选准确率达到99.99%。在医药冷链仓库的特殊应用中,二维码标签表面涂覆的耐低温涂层可在-25℃环境下保持10年使用寿命,确保AGV在冷冻环境中的可靠导航。

四.应用原理详细步骤
导航系统初始化与二维码铺设
地面处理采用环氧树脂自流平工艺,平整度要求≤3mm/2m。二维码标签以嵌入式安装与地面齐平,表面覆盖5mm聚碳酸酯耐磨层.每个二维码标签包含唯一位置编码、偏移量、航向角等信息,采用标准格式;按 AGV 行驶路径间隔 1 – 3 米铺设,覆盖关键区域,形成导航网络;标签需避开高磨损区域并定期维护。
二维码识别与数据采集
AGV 搭载高分辨率摄像头或激光扫描器捕捉二维码图像,通过图像算法提取标签信息;传感器将位置坐标、偏移量、航向角等数据实时传输至控制器;优化传感器安装高度和角度,确保有效识别区域覆盖。
数据处理与定位计算
控制器根据二维码位置编码匹配预设地图全局坐标,确定 AGV 绝对位置;通过二维码反馈的偏移量和航向角,计算相对于预设路径的偏差并生成纠偏指令;结合编码器里程数据和 IMU 航向角,修正累计误差,提高定位精度。
路径规划与动态调整
调度系统根据任务需求生成导航指令序列并下发至 AGV 控制器;AGV 行驶中实时读取二维码数据,若检测到偏移超 5mm ,通过 PID 控制算法调整驱动轮转速回归预设路径;在二维码间空白区域,依赖 IMU 和编码器推算位置,直至下一标签重新校正。
多传感器融合与闭环控制
激光雷达、超声波传感器实时监测障碍物,触发紧急避让或路径重规划;控制器综合二维码定位、传感器反馈和运动控制指令,形成闭环系统,实现 ±1mm 级定位精度;避障信号与导航数据融合,确保 AGV 在动态环境中安全行驶。
五.关键流程总结
初始化时铺设含位置和方向信息的二维码标签;通过视觉传感器捕捉并解析标签数据进行识别;匹配全局坐标并修正误差完成定位;按指令序列行驶并动态调整轨迹,实现路径执行 。

过去22年来,江苏亿控智能装备有限公司专注于移动机器人(AGV/AMR)核心部件的研发、生产和销售,产品包括驱动轮、电机控制器、差速轮、减速电机、伺服电机等。凭借过硬的技术、可靠的质量和有竞争力的价格,亿控智能已经成长为中国最大的移动机器人集成供应商之一。我们为国内外众多行业的客户提供解决方案和优质产品。

您好!请登录